
Robots
In the context of “RELIEF”, we are building two terrestrial robots, a drone and a repeater. The two robots are equipped with sensors that allow them to create a map of the environment and locate themselves in it (Simultaneous Localization and Mapping - SLAM). At the same time, they are equipped with one (or more) RFID reader(s), which constantly interrogate any RFID tag around. By properly processing the information that the tag sends, the robot determines the location of the tags and thus the location of the products that they are attached to.
Drone
Similarly the drone repeats the same process, deploying a different architecture, and less precisely, as it cannot lift the weight of the equipment of the terrestrial robots. In order to lift such equipment, the drone would have been too large and impractical for enclosed spaces. However, the drone is able to record all the products in its flight area and to determine their position with a few centimeters (less than 30cm) accuracy.
Repeater
Finally, we build a repeater capable of increasing the available power on the label, increasing the reading area of the reader. As the tags (RFID tags) do not have a battery, they limit the range of an RFID system. Instead, the reader could "read" a label from a larger distance, as part of its sensitivity remains untapped. We propose to build a cheap repeater that boosts the power on the label so it can be read from a longer distance.
-
-

Robot First of all, it is required to attach RFID tags onto each product that we are interested in monitoring and associate the unique RFID code to the product in the enterprise’s database. The robots initially move around the area and form a map of the area.
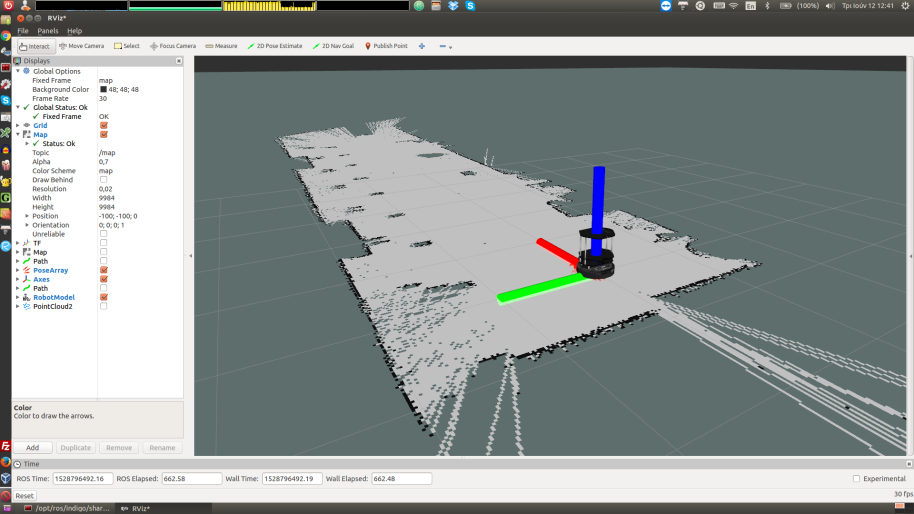
Then the robots will move around the area and locate their position therein. They can be set to autonomous inventorying or manual. While moving, they get measurements from the RFID tags attached to the surrounding products, while the robot's own position is constantly updated. For each tag being read, its position in the space is calculated. As the robot moves, it reads each tag again and again (each time from an adjacent position). Thus, the location of the tag (product) is constantly improved as the measurement samples are increased. In addition, a sufficiently accurate estimation of the measurement error is provided. Thus, in cases where the error is considered to be large (e.g., greater than 20cm), the robot revisits the same area, in order to collect new tag-readings and ultimately improve the accuracy of the estimation. An original robot with a single reader and a single antenna has already been built by the project team, as proof-of-concept demo and is shown below during its experimental operation at AUTh.
The repeater must be placed in a suitable position to amplify the electromagnetic field on remote tags, allowing them to backscatter the modulated signal, which is eventually read by standard off the shelf RFID readers. By installing multiple repeaters, one can create a wireless relay network capable of multiplying a reader's "maximum" read distance which can reach ≥50m. Such distance can only be achieved if there are no obstacles between the tags and the reader. The next image shows the first lab-experiments, where the repeater provides a 20m reading distance (the labels are located at the end of the corridor - they are supported by a tripod).