
Ρομπότ
Στο Relief κατασκευάζουμε δύο επίγεια ρομπότ. Τα δύο επίγεια ρομπότ είναι εφοδιασμένα με αισθητήρες που τους επιτρέπουν να φτιάχνουν χάρτη του χώρου στον οποίο κινούνται και να βρίσκουν τη θέση τους σε αυτόν (Simultaneous Localization and Mapping – SLAM). Παράλληλα, είναι εφοδιασμένα με αναγνώστη τεχνολογίας RFID (RFID reader), ο οποίος αδιάκοπα «διαβάζει» οποιαδήποτε ετικέτα τεχνολογίας RFID βρίσκεται γύρω του. Μέσω κατάλληλης επεξεργασίας των πληροφοριών που του στέλνει η ετικέτα, ο υπολογιστής που βρίσκεται πάνω στο ρομπότ καταφέρνει να προσδιορίσει τη θέση των ετικετών και άρα τη θέση των προϊόντων πάνω στα οποία αυτές έχουν κολληθεί.
Drone
Περίπου τα ίδια πράγματα «προσπαθεί» να πετύχει και το drone, αλλά ενδεχομένως με μικρότερη ακρίβεια, καθώς δεν μπορεί να σηκώσει το βάρος που σηκώνουν τα επίγεια ρομπότ. Για να «πετάξει» ο επίγειος εξοπλισμός, το drone θα έπρεπε να γίνει πολύ μεγάλο και μη πρακτικό για κλειστούς χώρους. Ωστόσο και το drone είναι ικανό να καταγράψει όλα τα προϊόντα στην περιοχή πτήσης του και να προσδιορίσει τη θέση τους με ακρίβεια λίγων εκατοστών (κάτω από 30cm).
Επαναλήπτης
Κατασκευάζουμε έναν επαναλήπτη, ικανό να αυξήσει τη διαθέσιμη ισχύ στην ετικέτα, αυξάνοντας την περιοχή ανάγνωσης του αναγνώστη. Καθώς οι ετικέτες (RFID tags) δεν διαθέτουν μπαταρία, περιορίζουν την εμβέλεια ενός RFID συστήματος. Αντιθέτως, ο αναγνώστης θα μπορούσε να «διαβάσει» μία ετικέτα από μεγαλύτερη απόσταση, καθώς μέρος της ευαισθησίας του παραμένει ανεκμετάλλευτο. Προτείνουμε την κατασκευή ενός φτηνού επαναλήπτη που ενισχύει την ισχύ στην ετικέτα έτσι, ώστε να μπορεί να διαβαστεί από μεγαλύτερη απόσταση.
-
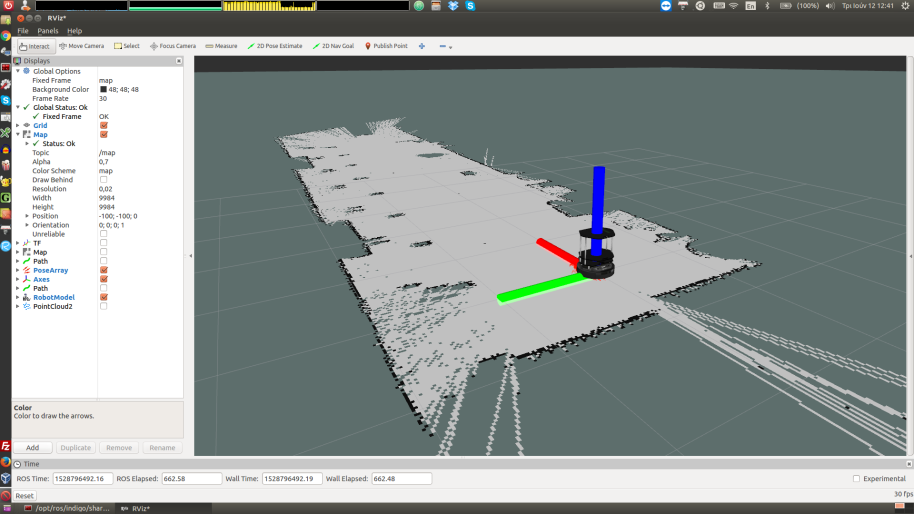
Χάρτης της περιοχής, όπως δημιουργείται από πρωτότυπο ρομπότ που έχει κατασκευαστεί από την ομάδα έργου. -

Πρωτότυπο ρομπότ. Καταρχήν απαιτείται η επικόλληση RFID ετικετών σε κάθε προϊόν που μας ενδιαφέρει να παρακολουθούμε και η συσχέτισή του μοναδικού RFID κωδικού με το προϊόν στην βάση δεδομένων του λογισμικού της εταιρίας και του δικού μας. Τα ρομπότ κινούνται αρχικά στο χώρο και διαμορφώνουν έναν χάρτη της περιοχής.
Στη συνέχεια, κινούνται στον χώρο και μπορούν να αντιλαμβάνονται τη θέση τους. Η κίνηση μπορεί να γίνει αυτόνομα ή χειροκίνητα. Κατά τη διάρκεια της περιήγησής του στο χώρο, λαμβάνουν μετρήσεις από τις RFID ετικέτες των γύρω προϊόντων, ενώ ανανεώνεται συνεχώς η εκτίμηση της θέσης του ίδιου του ρομπότ. Για κάθε κωδικό προϊόντος που διαβάζεται, γίνεται υπολογισμός της θέσης του στον χώρο. Καθώς το ρομπότ κινείται, διαβάζει ξανά και ξανά κάθε ετικέτα (κάθε φορά από γειτονική θέση). Έτσι, ο υπολογισμός της θέσης του προϊόντος βελτιώνεται διαρκώς, καθώς τα δείγματα μέτρησης πληθαίνουν. Επιπλέον, παρέχεται ικανοποιητικά ακριβής εκτίμηση του σφάλματος της μέτρησης. Έτσι, σε περιπτώσεις που το σφάλμα θεωρείται μεγάλο (π.χ. μεγαλύτερο από 20cm), το ρομπότ ξαναπηγαίνει στην ίδια περιοχή με σκοπό να συλλέξει νέες μετρήσεις των ετικετών και τελικά να βελτιώσει την ακρίβεια της εκτίμησης της θέσης του προϊόντος. Ένα πρωτότυπο ρομπότ με έναν μόνο αναγνώστη και μία μόνο κεραία έχει ήδη κατασκευαστεί από την ομάδα έργου και φαίνεται παρακάτω, κατά τη διάρκεια πειραματικής λειτουργίας του στο ΑΠΘ.
Ο επαναλήπτης αρκεί να τοποθετηθεί σε κατάλληλη θέση, ώστε να ενισχύσει το ηλεκτρομαγνητικό πεδίο σε απομακρυσμένες ετικέτες και αυτές να διαβαστούν από τον αναγνώστη. Τοποθετώντας πολλούς επαναλήπτες, μπορεί κανείς να δημιουργήσει ένα ασύρματο δίκτυο αναμεταδοτών (relay network), ικανό να πολλαπλασιάσει την «αξιόπιστη» απόσταση ανάγνωσης ενός αναγνώστη και μπορεί να την φτάσει και ≥50μ. Αυτές οι αποστάσεις μπορούν να επιτευχθούν μόνο αν δεν μεσολαβούν εμπόδια μεταξύ των ετικετών και του αναγνώστη.